This project makes use of a photoresistor as a light sensor to control the movement of a servo motor’s shaft. The change of position in the servo motor’s output shaft moves from 0 degrees to 180 degrees maximum depending upon the light intensity present at the photoresistor. The highest level of light places the output shaft arm to 0 degrees while the absence of light at the sensor moves the output shaft arm to about 180 degrees. The actual range of motion is limited to the quality of the servo, but 180 degrees is generally the limit.
All components in the system are powered by the Arduino Uno (R3) through the USB connection from a local supply or computer.
The purpose of the project is to demonstrate the simple use of a servo for the automatic positioning of a physical object as a function of light intensity. The light sensor is read at an analog GPIO pin to get continuously variable values to read into memory via an analogRead operation. The motor response to continuous analog read activity (with a small 250ms delay between each) is calculated to a PWM output level written to a port where the output shaft moves at a corresponding angle.
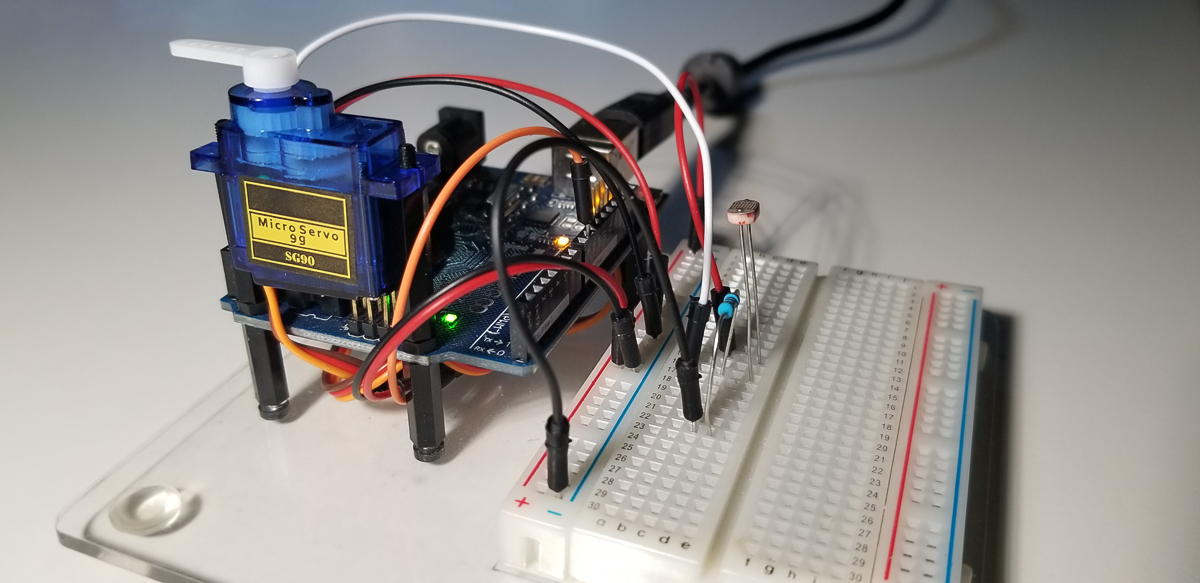
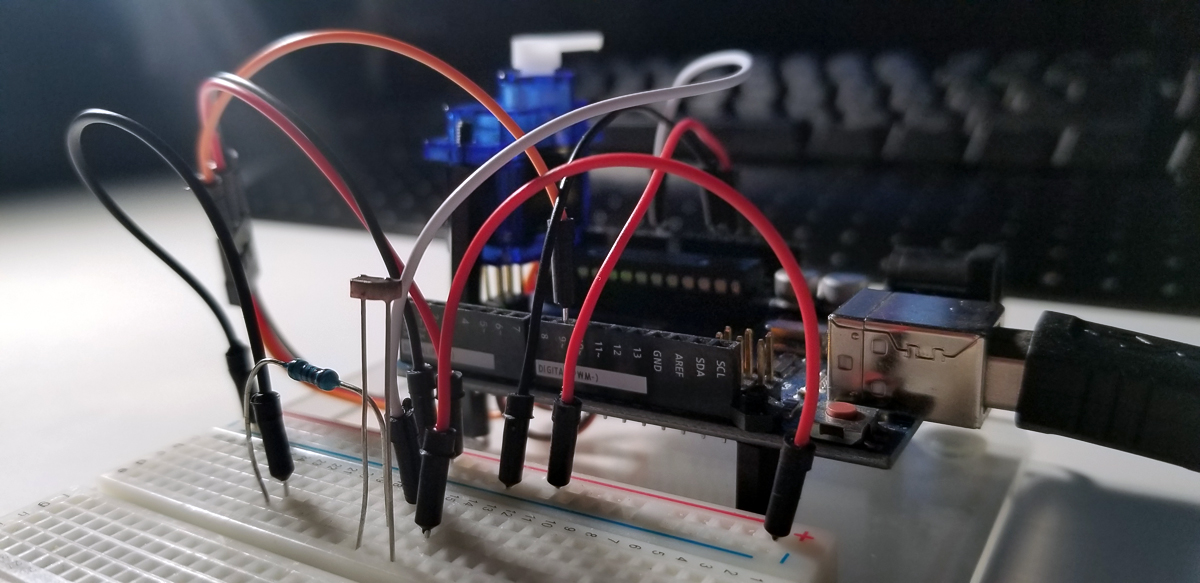
Project Operation:
Contents
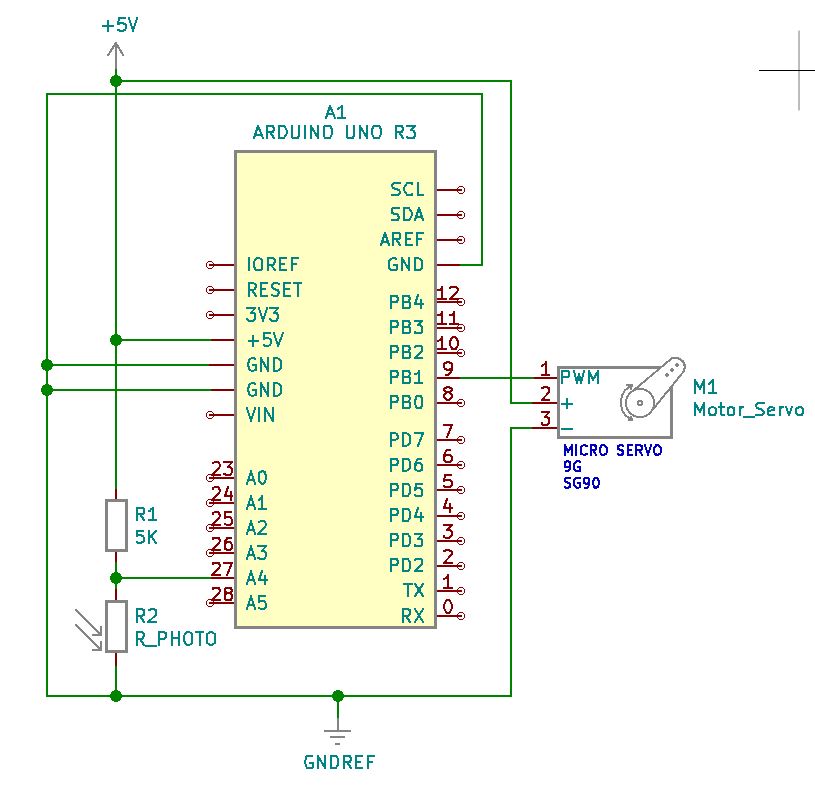
Project Schematic:
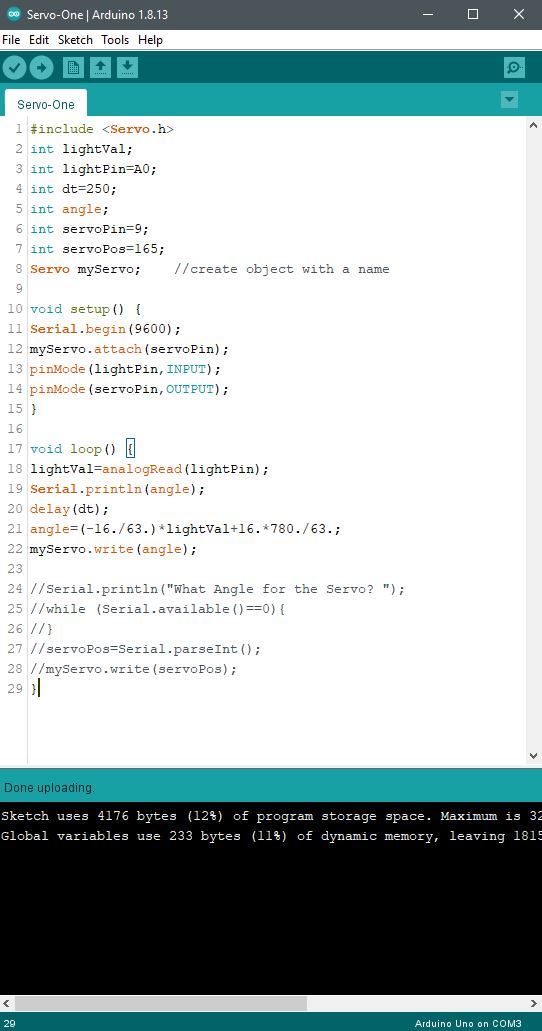
Arduino IDE:
Servo Output Angle Calculations:

Code Setup:
#include <Servo.h>
int lightVal;
int lightPin=A4;
int dt=250;
int angle;
int servoPin=9;
int servoPos=165;
Servo myServo; //create object with a name
void setup() {
Serial.begin(9600);
myServo.attach(servoPin);
pinMode(lightPin,INPUT);
pinMode(servoPin,OUTPUT);
}
void loop() {
lightVal=analogRead(lightPin);
Serial.println(angle);
delay(dt);
angle=(-16./63.)*lightVal+(16.*780.)/63.;
myServo.write(angle);
}










Comments are closed.