This category of posts concerns 9-axis degrees of freedom positioning with inertial measurement unit (IMU) systems. Involving hardware that supports the intelligence of algorithms, simulations, filtering, and modeling associated with the programming required for physical or tangible implementation. So this topic is largely theoretical with a touch of practical applications.
IMU Acceleration, Gyro, & Magnetometer Calibration
In an effort to produce reliable quantitative angles of tilt and roll of the IMU module, it is necessary to calibrate all 9-axis vectors. Acceleration, gyroscope, and magnetometer are together ... Read More
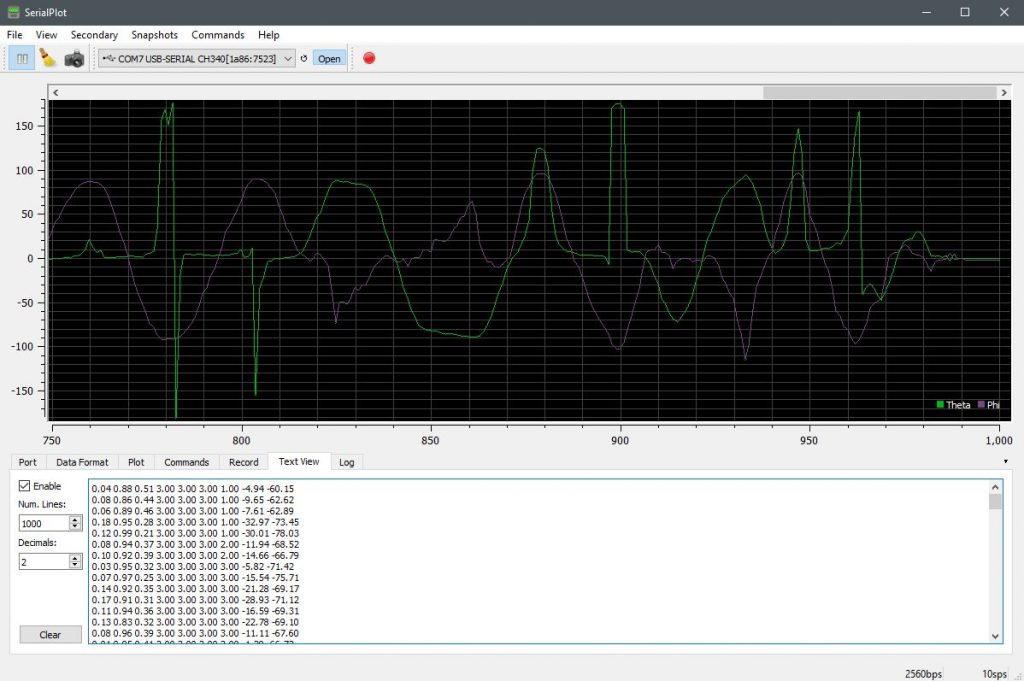
IMU Data Serial Plotter Setup and Configuration
Similar to the serial plotter on the Arduino Sketch IDE, there is a useful real-time serial plotter application at the Hackaday site. It is free and it offers configuration options ... Read More
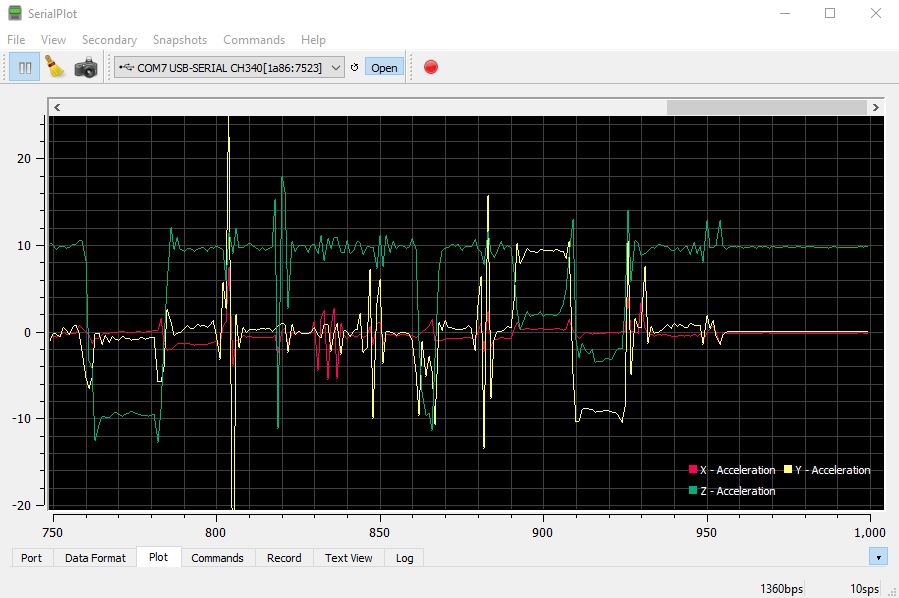
BNO055 IMU 9-Axis DOF Acceleration Analysis
In an effort to further delve into the inner workings of the BNO055 accelerometer and its functions, the serial plotter was applied to the project. To better understand how the ... Read More
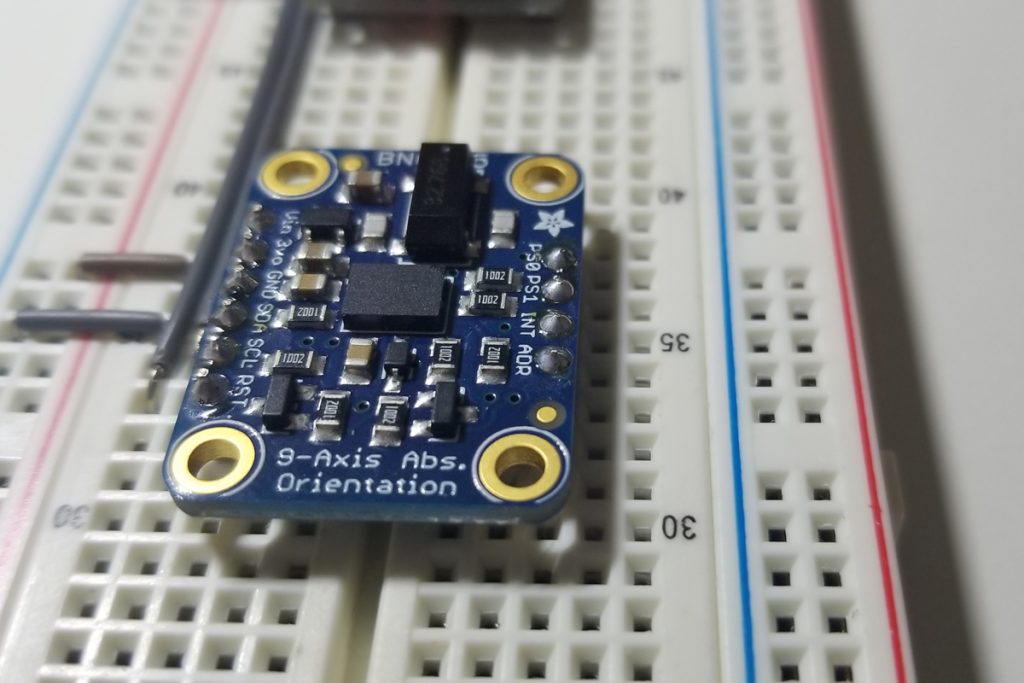
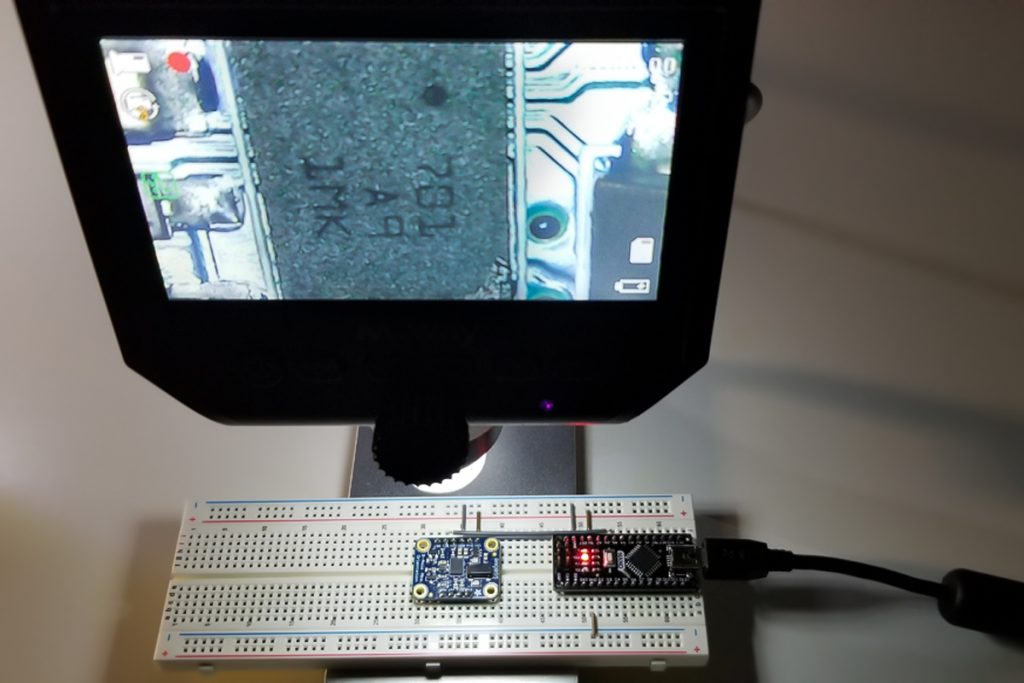
BNO055 IMU 9-Axis DOF Hardware & Software Setup
Once initial hardware is in place, it is necessary to gather the libraries to run the software and get connectivity and begin gathering the Arduino unit and the BNO055 IMU ... Read More













